
Seong Ho Yeon
I am a PhD candidate in the Biomechatronics group at MIT Media Lab advised by Prof. Hugh M. Herr. I am also a Graduate Research Fellow at K. Lisa Yang Center for Bionics at MIT. Prior to my PhD, I received M.S. in Media Arts and Sciences (MAS) from MIT in 2019, and I've received B.S. in Electrical Engineering from Georgia Institute of Technology and Korea Advanced Institute of Science and Technology (KAIST) in 2016. During my time at Georgia Tech, I received Roger P. Webb. ECE Senior Scholar Award.
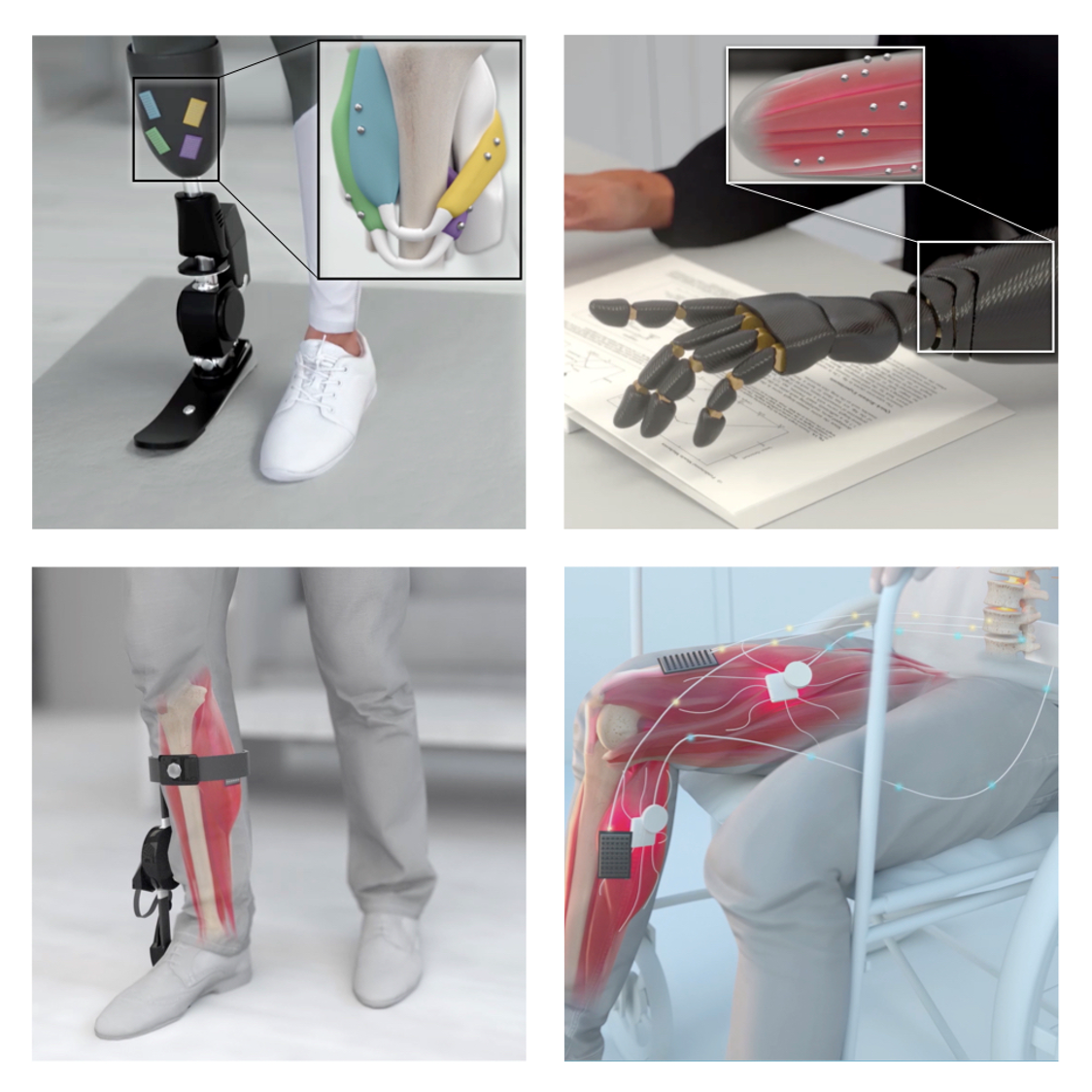
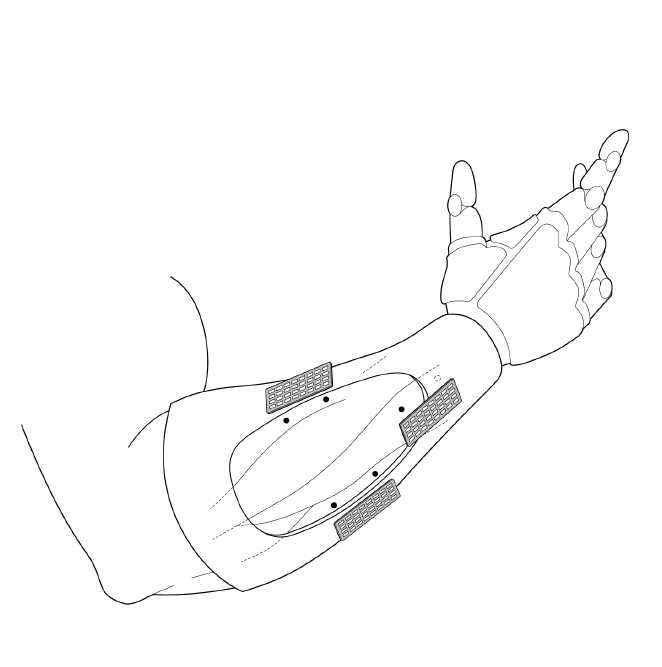
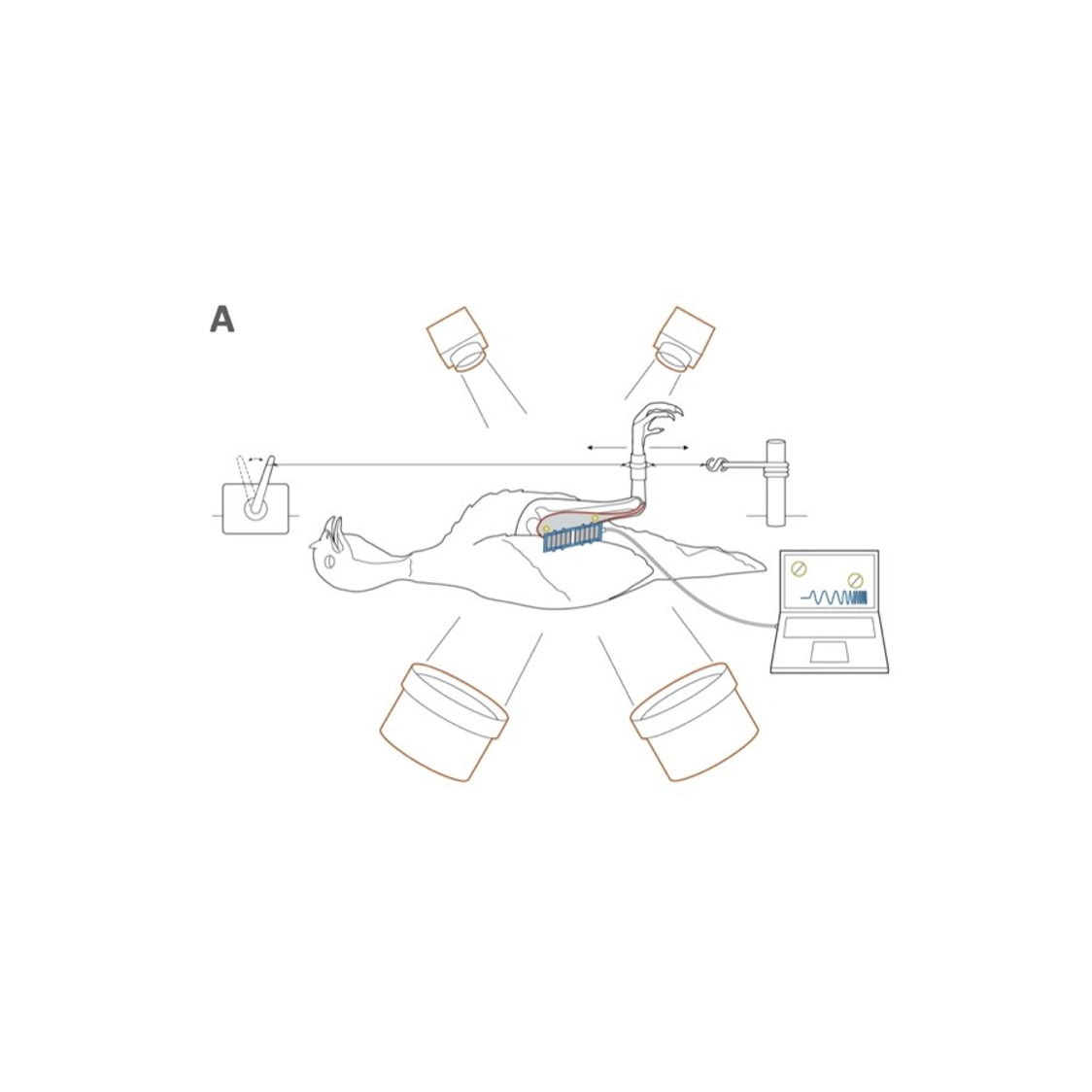
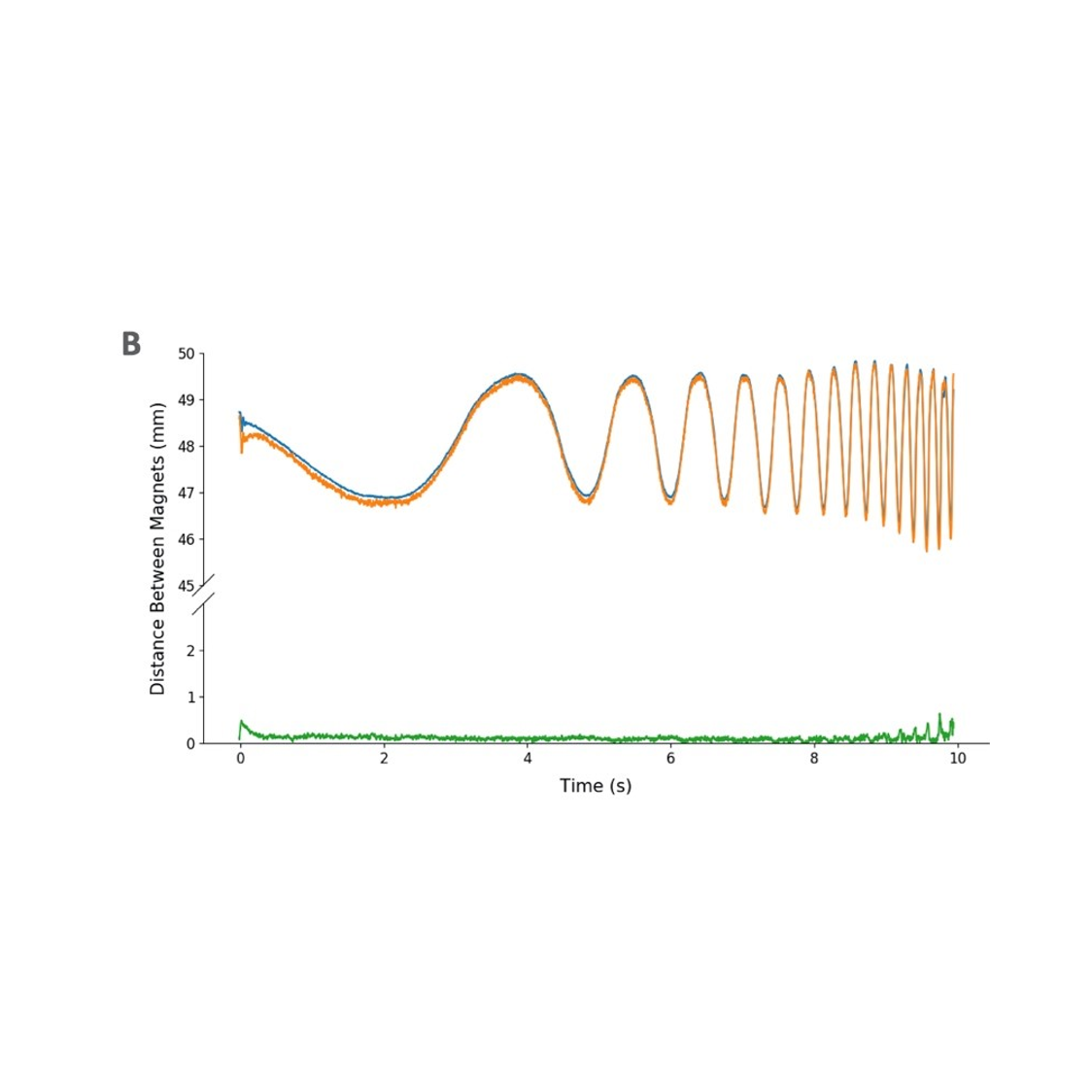
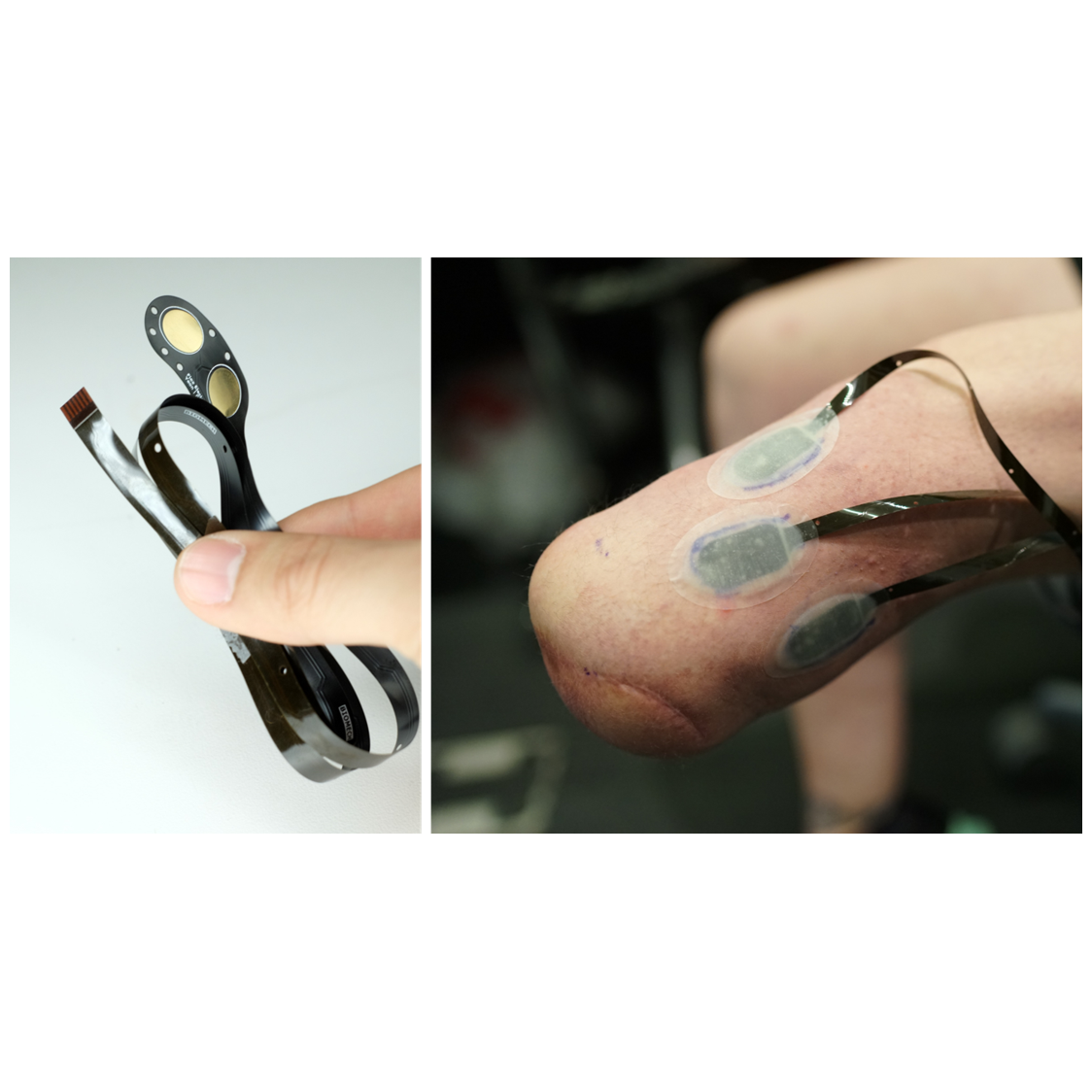
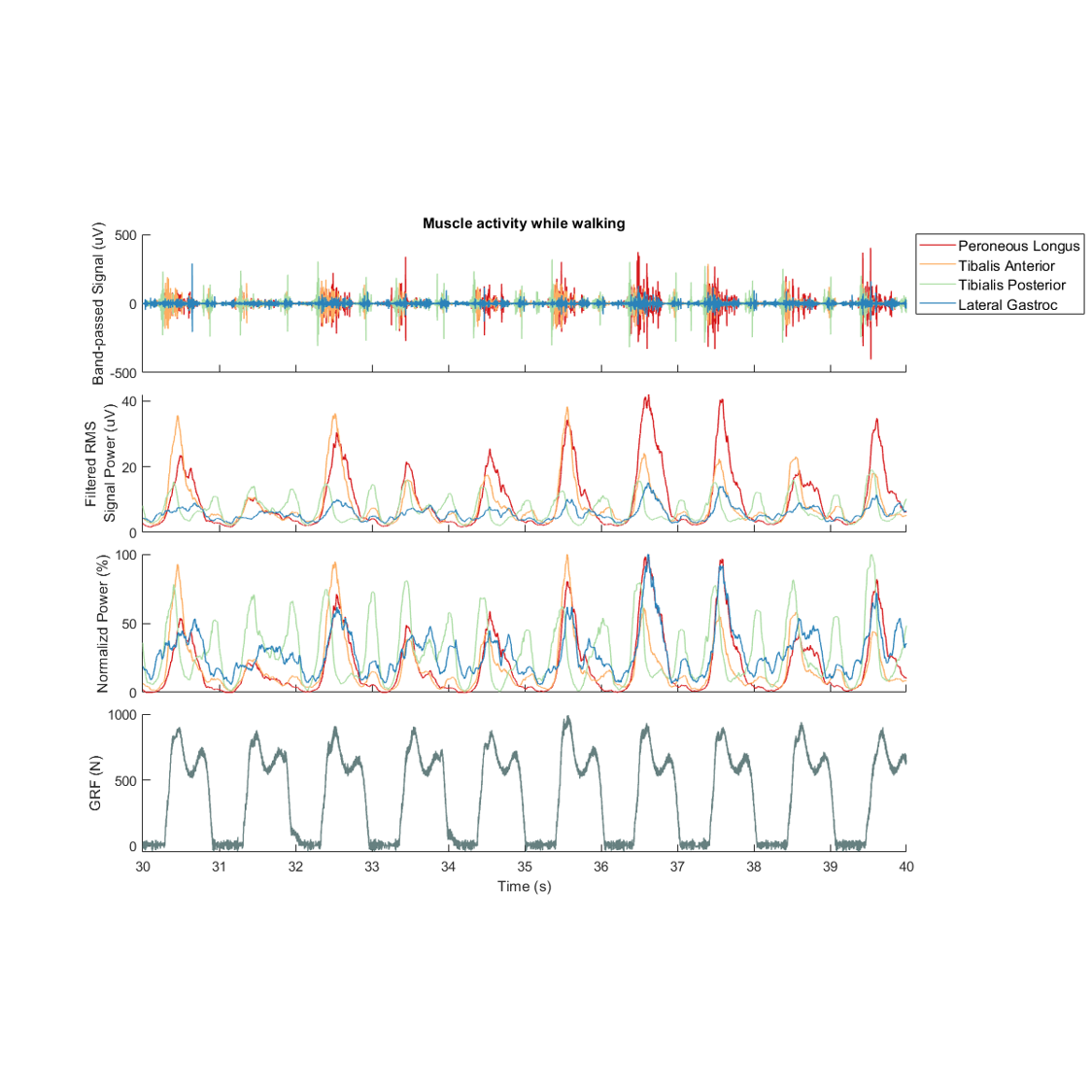
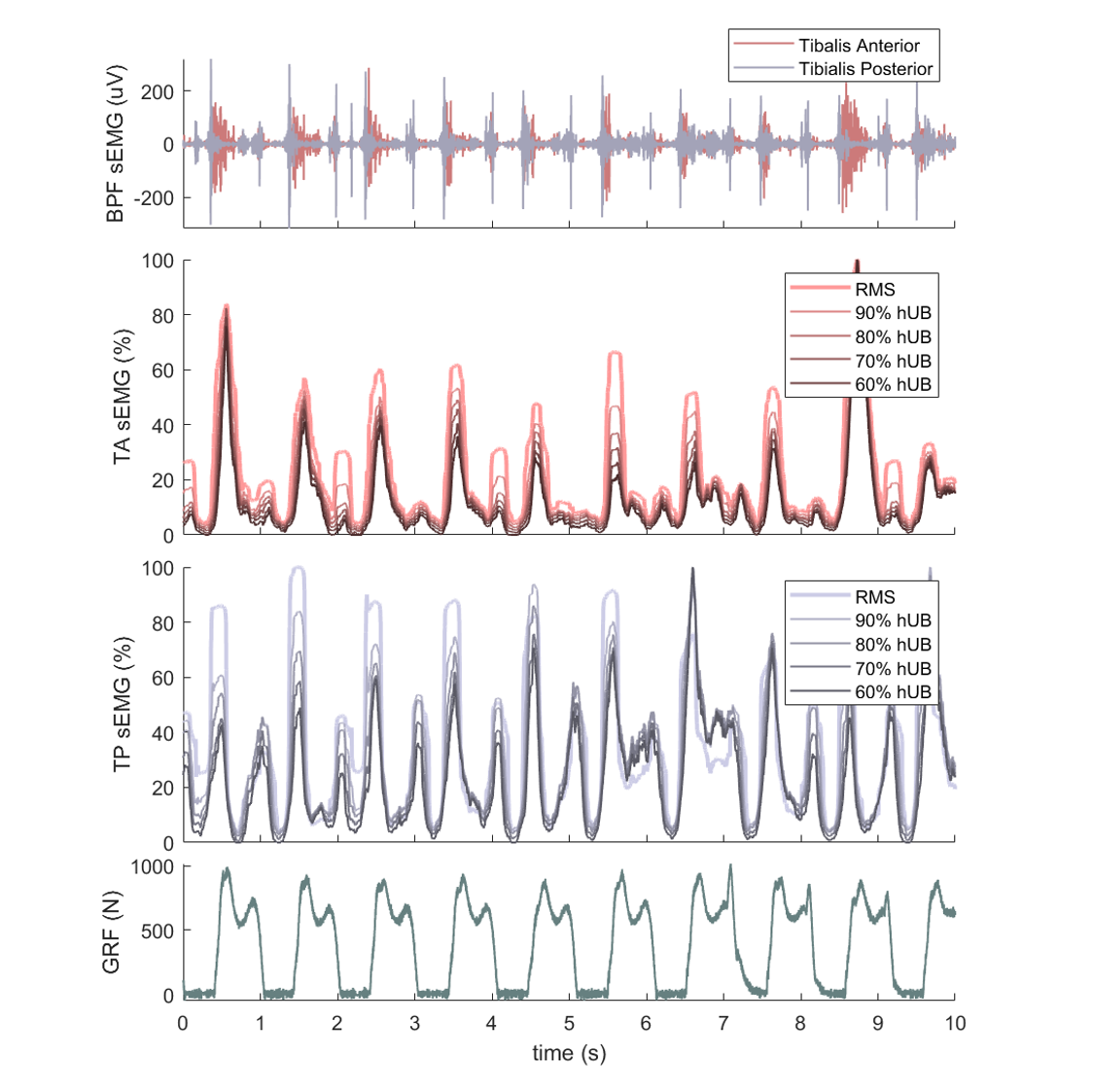
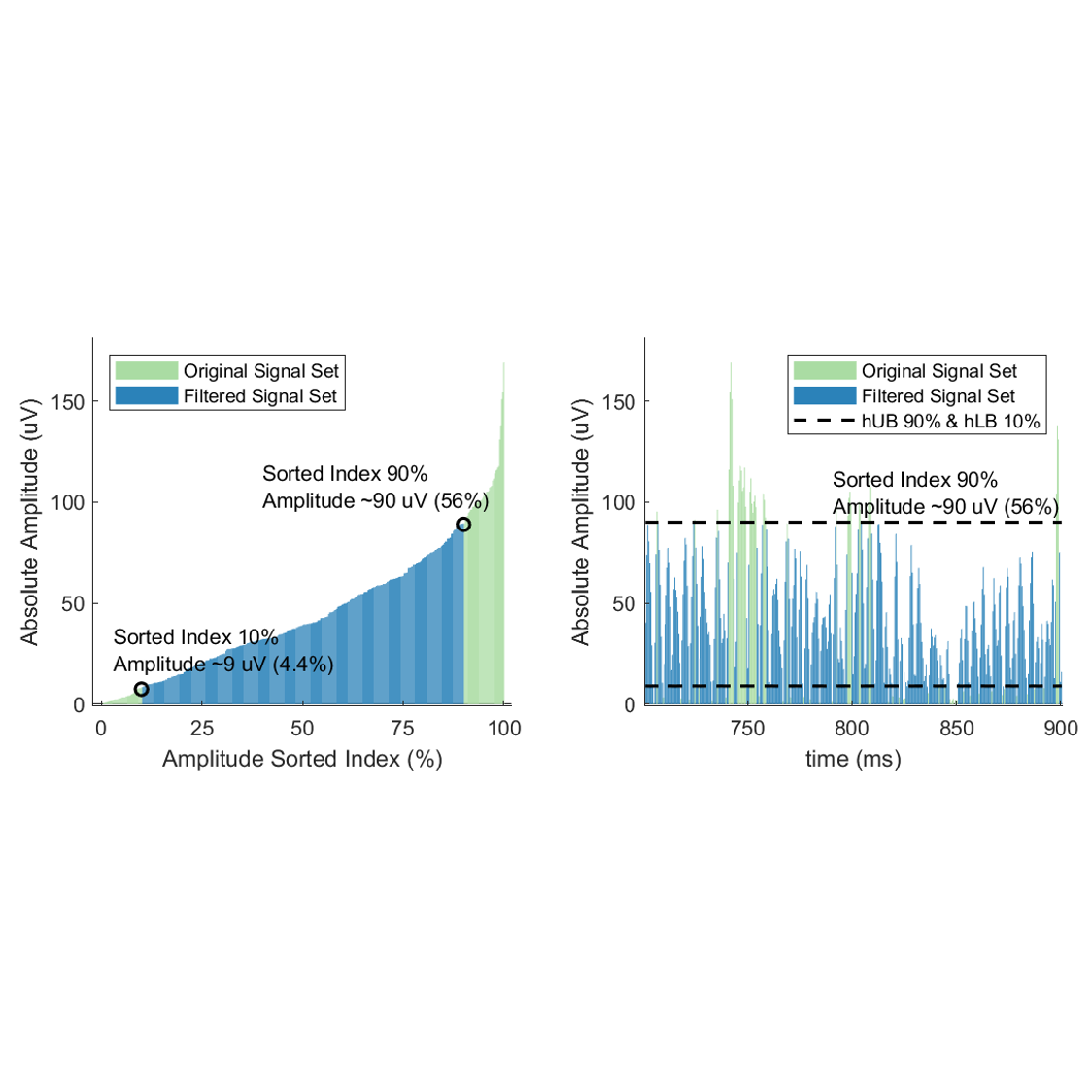
My research interests lie in the intersection of bionics, robotics, and neural interfaces. The focus of my doctoral research is to enable versatile and seamless bionic applications by improving and expanding neural interfaces modalities and developing superior control architectures. The interdisciplinary nature of my PhD study has allowed me to encompass embedded system design, digital signal processing, modern robotics and optimization, and even neurosciences.
During my PhD study, I did internships at Google and the Robotics Lab at Hyundai Motor Company. Prior to my PhD, I interned in the Robotics Group at Naver Labs and the MX division at Samsung Electronics.
I view myself primarily as a system engineer. I like to a) understand basic building blocks, b) understand interfaces and interactions between these building blocks, and c) optimize networks of the building blocks with varied design criteria and limitations for creating synergized value and solving new problems.
Robotics recently became a symbolic pinnacle of system engineering. The field is a manifestation of multi-disciplinary system engineering. To me, it is intriguing that complex knowledge in dynamics, kinematics, non-linear optimization, path planning, and control theory gets consolidated into physical form based on the foundation of systematic integration with electrical and mechanical building blocks. I found that my background in varied system engineering put me in a unique position where I can understand and integrate low-level electrical system and operating system with advanced control theories and algorithms. Also, working with researchers in different disciplines help me develop a fluid mindset that transcends disciplines and learn system conventions across various fields of engineering. With that, I have made efforts to grow as a control system engineer with robotics emphasis.